DEVELOPMENT BLOG 2026
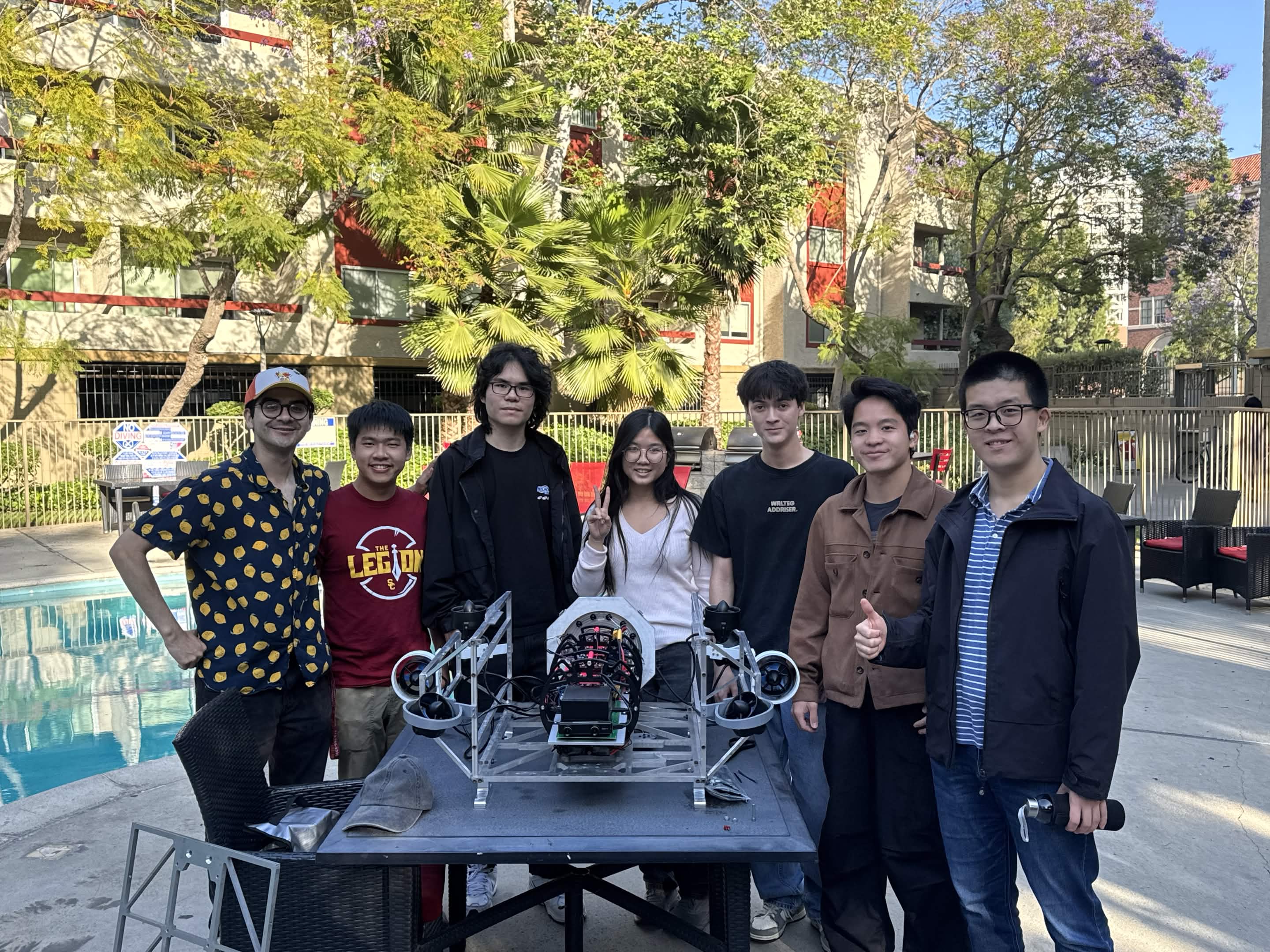
Development Blog 2026
Milestone-by-milestone from dry-dock to full-system pool operations: how software, electrical, and mechanical came together across the spring wet tests.
June 20266 min read
READ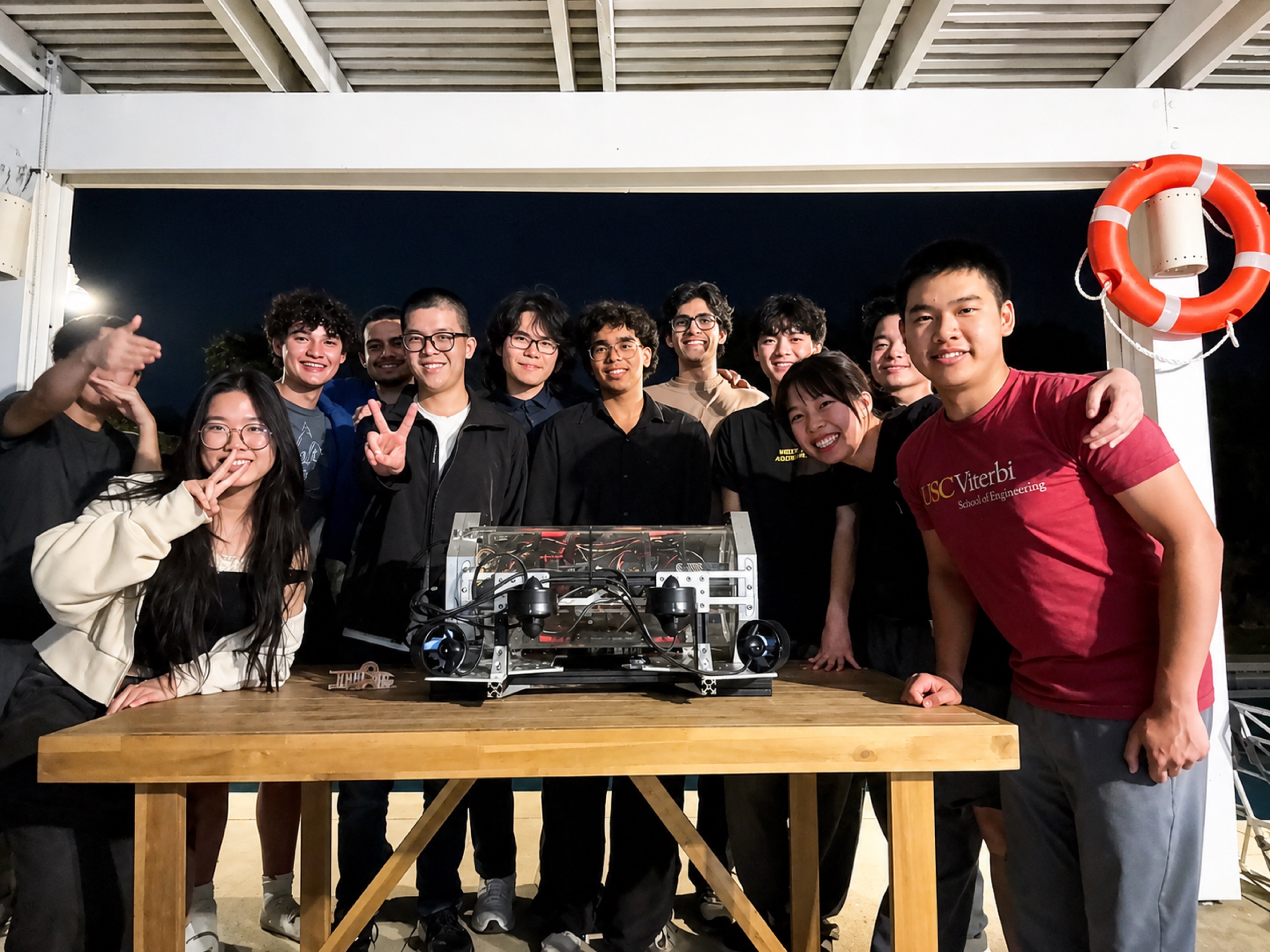
ROBOSUB 2026 COMPETITION LOG
RoboSub 2026 Competition Log
Five days at the Woollett Aquatics Center in Irvine: pool-deck problem-solving, an overnight rebuild, and a run into the Autonomy Challenge semi-finals.
July 11–16, 20267 min read
READ