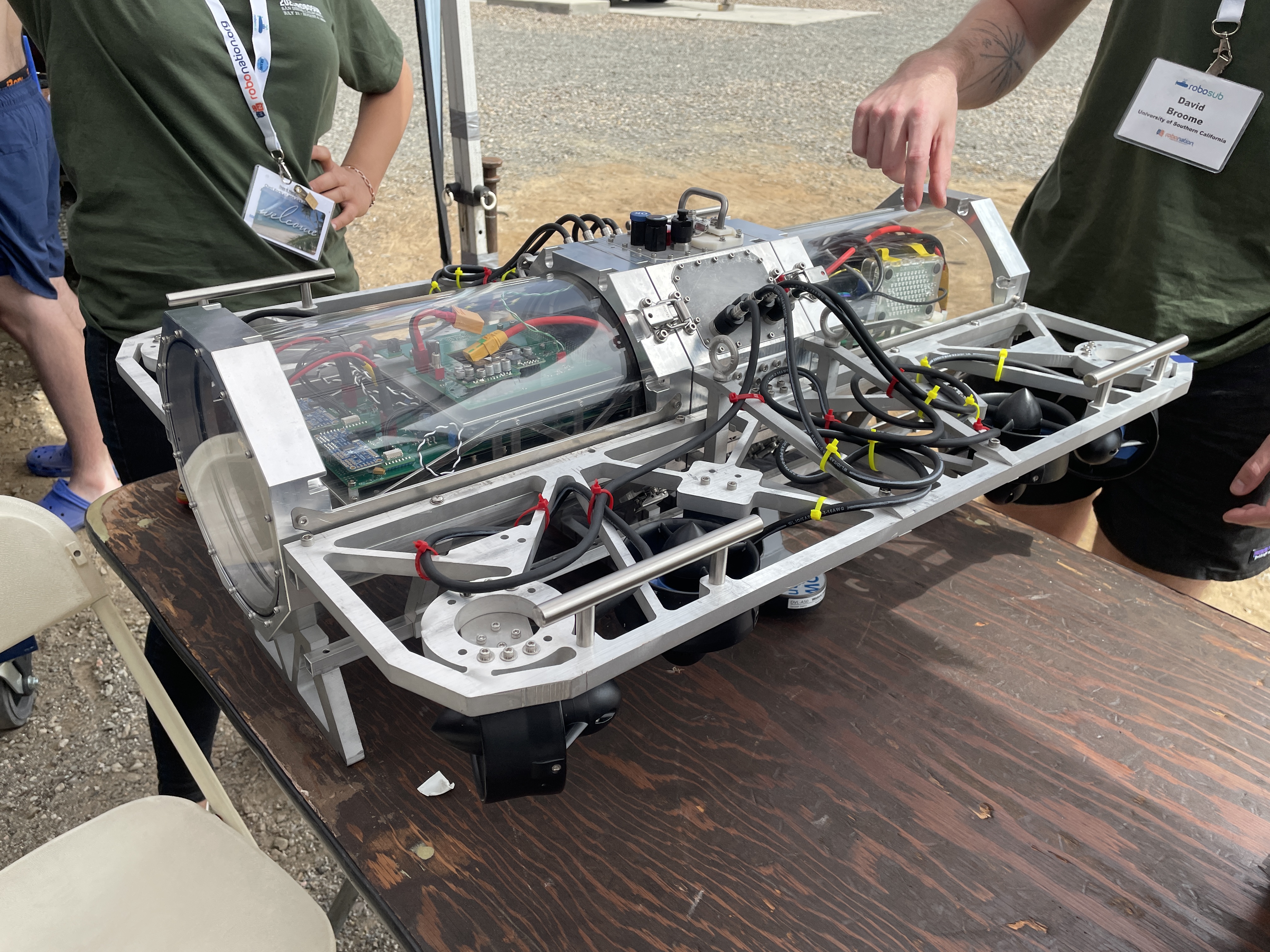
Meet The Barracuda
Our 2025 AUV represents years of iterative design and engineering, featuring autonomous capabilities and a modular multi-hull design built entirely by students.
KEY FEATURES
- Fully Integrated Sensor Fusion
- Simplified Hydrodynamics
- Modular Multi-Hull Design
- Doppler Velocity Log
- Imaging Sonar for Localization
- Containerized & Modular Software
21 YEARS OF INNOVATION
Founded in 2005, USC AUV started as a small group of students experimenting with underwater robotics in dorm rooms and campus workspaces. Over the years, it has grown into a multi-disciplinary team of more than 25 members united by a shared interest in autonomous maritime technology. Our team brings together students from across Viterbi and other fields, combining strengths in software, mechanical design, electronics, systems engineering, and operations to solve the unique challenges of underwater autonomy.
Over the past two decades, the team has evolved from building hand-assembled prototypes with simple navigation logic to developing sophisticated autonomous systems capable of operating in demanding underwater environments. Today, we are focused on Barracuda 2.0, built on a modern ROS 2 Humble stack running on the NVIDIA Jetson AGX Orin. Our platform integrates advanced sensor systems, custom-sealed hull designs, and real-time SLAM pipelines to support reliable navigation and perception underwater.
At its core, USC AUV is about more than just building robots. It is a collaborative engineering environment where students turn classroom concepts into real-world systems through hands-on development, testing, and iteration. Our goal is to create autonomous vehicles that are not only capable, but also robust, maintainable, and ready for real-world deployment.
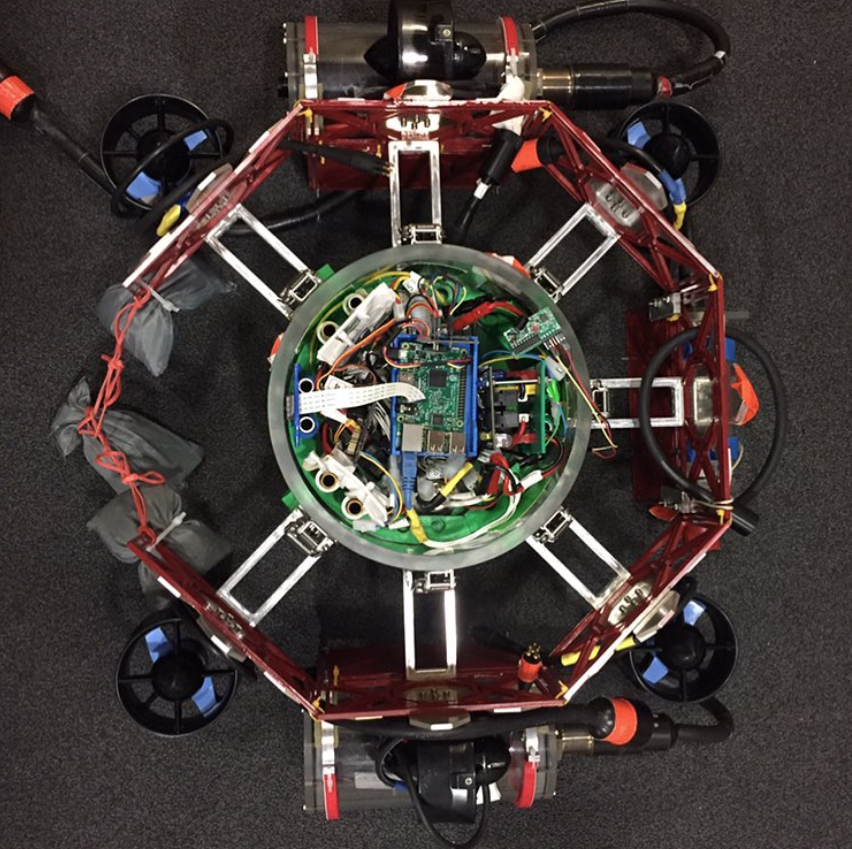
OUR PAST VEHICLES

OUR CORE VALUES
Engineering for Impact
We align with the Viterbi spirit of engineering solutions that matter. Whether developing custom hull seals for Barracuda 2.0 or refining localization algorithms, our work is driven by the goal of advancing marine autonomy to solve real-world problems.
Collaborative Innovation
We draw strength from the multi-disciplinary diversity of the USC student body. By uniting Mechanical, Electrical, and Software engineers with business strategists, we reflect the university’s commitment to collaborative, cross-functional problem-solving.
Continuous Learning
We are a student-run organization that prioritizes the mentorship pipeline. From our ROS 2 Humble workflows to our custom Topside UI, we treat every sprint as an opportunity to bridge classroom curriculum with industry-standard robotics practice.
Resilience Under Pressure
Rooted in our 20-year history of overcoming technical bottlenecks, we value the grit required to move from a dry-dock prototype to a successful full-system pool operation. We believe the fastest way to improve a system is to make every component inspectable, serviceable, and trustworthy in the field.